哈希表¶
约 2657 个字 300 行代码 3 张图片 预计阅读时间 13 分钟
哈希表介绍¶
前面学习到的数据结构中,每一个数据与其位置没有相对映射关系,所以在比较时必须每一个元素都参与比较,顺序结构下的时间复杂度为O(N),平衡二叉搜索树下的时间复杂度为O(\(log_{2}{N}\)),为了使效率最优化,考虑使用一个新的数据结构:哈希表/散列表,该数据结构可以在查找中根据存储位置快速定位需要查找的元素,理论上的时间复杂度为O(1)
哈希表的数据插入和查找原理¶
数据插入:插入时会将数据通过哈希函数计算出在哈希表中的相对位置再存入
数据查找:查找时通过哈希函数计算查找的值可能出现的相对位置,从该位置读取是否存在需要查找的值
上面两种对数据处理的方法就称为哈希方法,使用到哈希函数计算相对位置,数据存储的位置即为哈希表/散列表结构
一般情况下来说,哈希函数可以设置为如下: $$ hash(key) = key \bmod capacity $$ 其中,\(key\)为原始数据,\(capacity\)为实际数据容量,例如在\(capacity\)为10的一个数组中,插入以下数据:
| C++ | |
|---|---|
1 | |
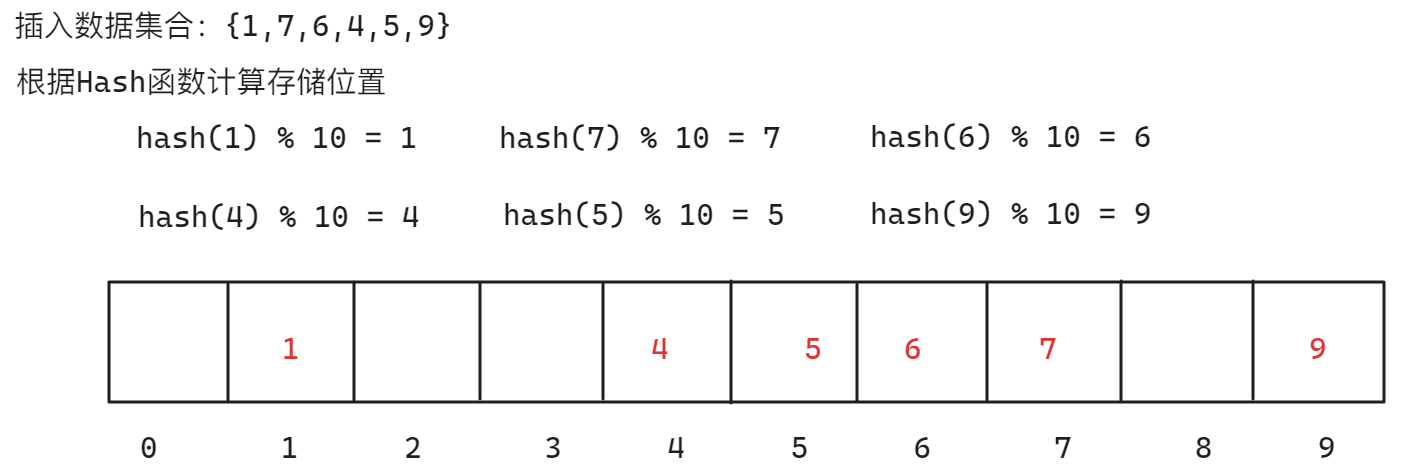
当查找时,如果查找的key值为7,则根据哈希函数计算存储位置为7,在下标为7的位置比对关键值,相等则查找完毕
哈希表的存放方法¶
- 直接定址法:直接定址就是直接确定地址,用\(key\)的值映射到一个绝对位置或者相对位置
- 除留余数法:通过\(hash(key) = key \bmod capacity\)函数计算出存储位置
对于直接定址法来说,因为\(key\)的值基本上就是对应的位置,所以根据\(key\)可以直接找到相对位置,时间复杂度基本上为O(1),并且每一个\(key\)只有对应的一个位置,不存在冲突情况,但是这种方法的缺点就是依赖\(key\)的集中程度,如果\(key\)值集中程度高,那么所开辟的空间也就相对较小,如果\(key\)值集中程度低,那么可能会造成开辟的空间很大,但是实际使用的部分却很少
对于除留余数法来说,因为通过哈希函数\(hash(key) = key \bmod capacity\)计算存储位置,所以其存储位置不会超过表的大小,但是存在通过哈希函数计算得到的余数相同的情况,所以会有冲突的情况,常见的解决冲突方法有两种:
- 闭散列:开放定址法,常见的有:线性探测、二次探测
- 开散列:哈希桶/拉链法
闭散列解决哈希冲突¶
思路¶
使用开放定址法中的线性探测方法为例
线性探测:根据哈希函数\(hash(key) = key \bmod capacity\)计算出相对位置,如果该位置已经有值,则向后移动一个单位长度,如果后一个位置也存在值,则继续向后移动一个单位,以此类推
例如插入在\(capacity=10\)时插入下面的数据:
| C++ | |
|---|---|
1 | |
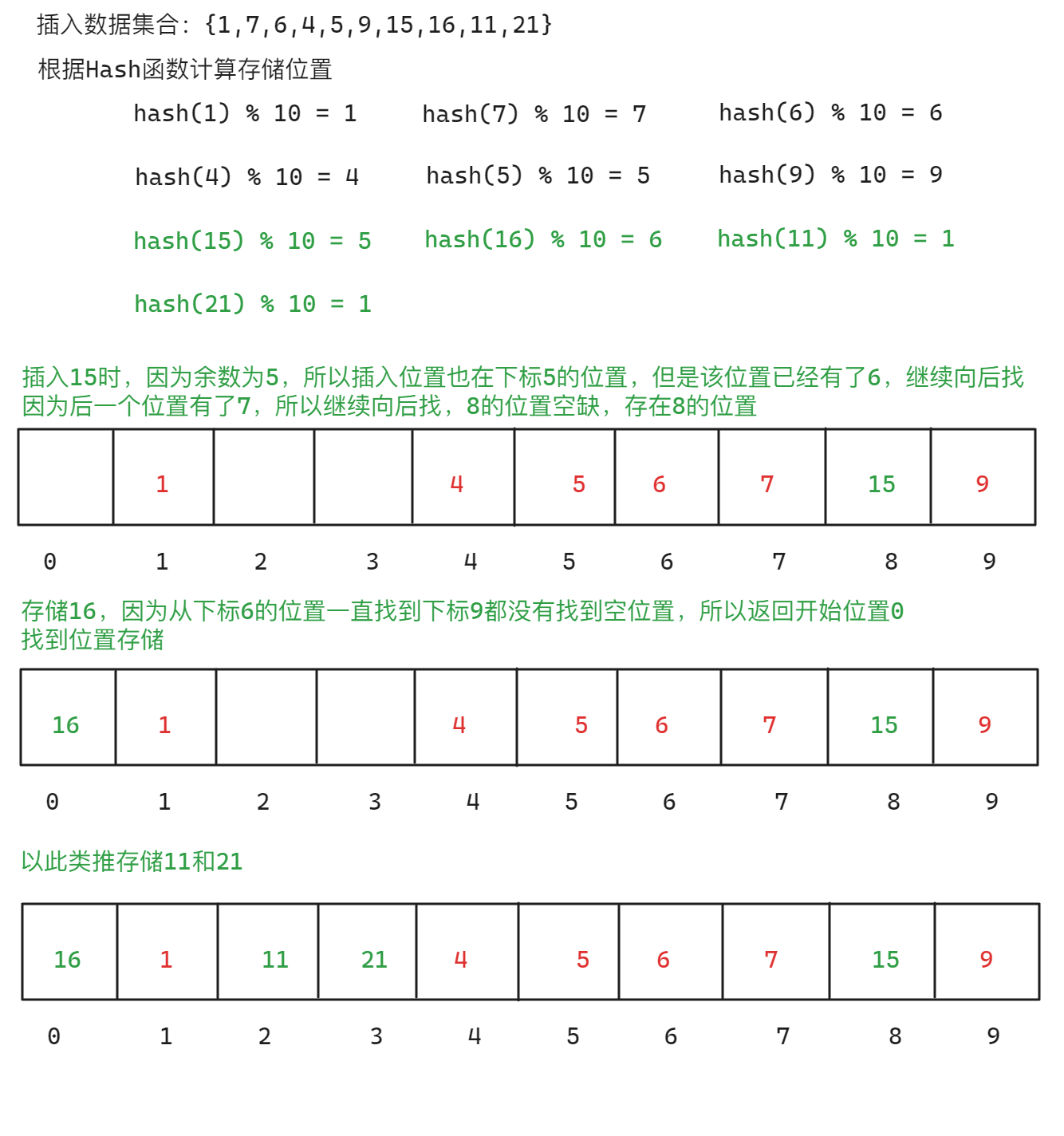
此时如果再想插入新的数据就会因为找不到空位置而插入失败,为了防止在插入过程中出现的容量不足的问题,解决哈希冲突的过程中也会引入负载因子/载荷因子,负载因子/载荷因子\(α=已经存储的元素个数/哈希表结构的容量\),如果负载因子的值超过指定的数值,那么就需要进行扩容,对于开放定址法来说,一般负载因子在0.7-0.8以下
代码设计¶
结构设计¶
每一个插入的数据结构设计,以键值对为例,还需要处理在查找/删除时需要用到的哈希表位置状态,在闭散列中,位置一共有三种状态
| C++ | |
|---|---|
1 2 3 4 5 6 7 | |
哈希表结构设计,需要一个vector类型数组充当表结构,为了计算负载因子,需要引入变量_count统计插入的数据个数
Empty状态Delete状态Exist状态
| C++ | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 | |
数据插入¶
处理数据插入:根据除留余数法,需要通过哈希函数\(hash(key) = key % capacity\)计算出存储位置,再找到空位置(不是删除位置和存在位置),当负载因子到达一定程度(本次设计为0.7)时进行扩容
设计时需要考虑到下面的问题:
- 哈希函数中的\(capacity\)是容量,但是对于vector来说不是
capacity(),而是size(),因为size()才是实际可以存储的容量,capacity()是备用的容量,多出来的部分不可以存储数值,并且[]无法访问size()外的数据 - 计算负载因子时,需要注意
_count和size()的值都是整型,所以进行除法时,计算的结果不可能出现小数部分,可以将_count和size()中的其中一个转化为小数类型,或者将_count乘以10,负载因子也乘以10,此时计算的结果依旧为整数,本次采用第二种方法 - 扩容时,可以考虑重新创建一个vector类型的新数组
newTable,其大小是已经存在的表的大小的2倍,但是需要注意,扩容过后,部分值通过哈希函数计算出来的位置可能发生改变,例如当\(capacity\)为10时,11的存储位置为1,但是\(capacity\)为20时,11的存储位置为11,此时还需要进行重新插入,所以为了减少插入逻辑的重复,可以考虑创建一个新的hash表对象,该对象中的_table成员大小是原来对象的2倍,新对象调用insert函数重新插入即可,插入时需要确保数据是未删除以及不为空的数据 - 本次实现的是不重复的键值对,所以如果出现重复的键值对时不能成功插入(调用接下来需要实现的
find()函数) - 因为负载因子到达0.7的时候就会进行扩容,所以在遍历过程中理论上不会存在所有位置都是
Exist状态,所以遍历空位置时可以使用判断Exist状态作为循环条件
| C++ | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 | |
数据查找¶
哈希表中的数据查找返回对应值位置的地址,根据key找到对应位置,如果该位置是Exist状态,比较key是否匹配,如果不匹配继续向后匹配位置是Exist状态时的key,查找时需要注意只有是存在状态的值才可以查找
| C++ | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 | |
数据删除¶
数据删除的思路:调用find函数,如果找到则将位置状态修改为Delete,改变数据个数_count,删除成功返回true,否则返回false
| C++ | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 | |
开散列解决哈希冲突¶
前面的闭散列最大的问题就是会彼此占用空间,需要多一项规则计算位置,不论是二次探测还是线性探测都是一样的原理,为了解决这种问题,采用开散列
思路¶
使用哈希桶/拉链法为例
哈希桶/拉链法原理:开辟一个指针数组,每一个指针指向存储的键值对
以插入下面的元素为例:
| C++ | |
|---|---|
1 | |
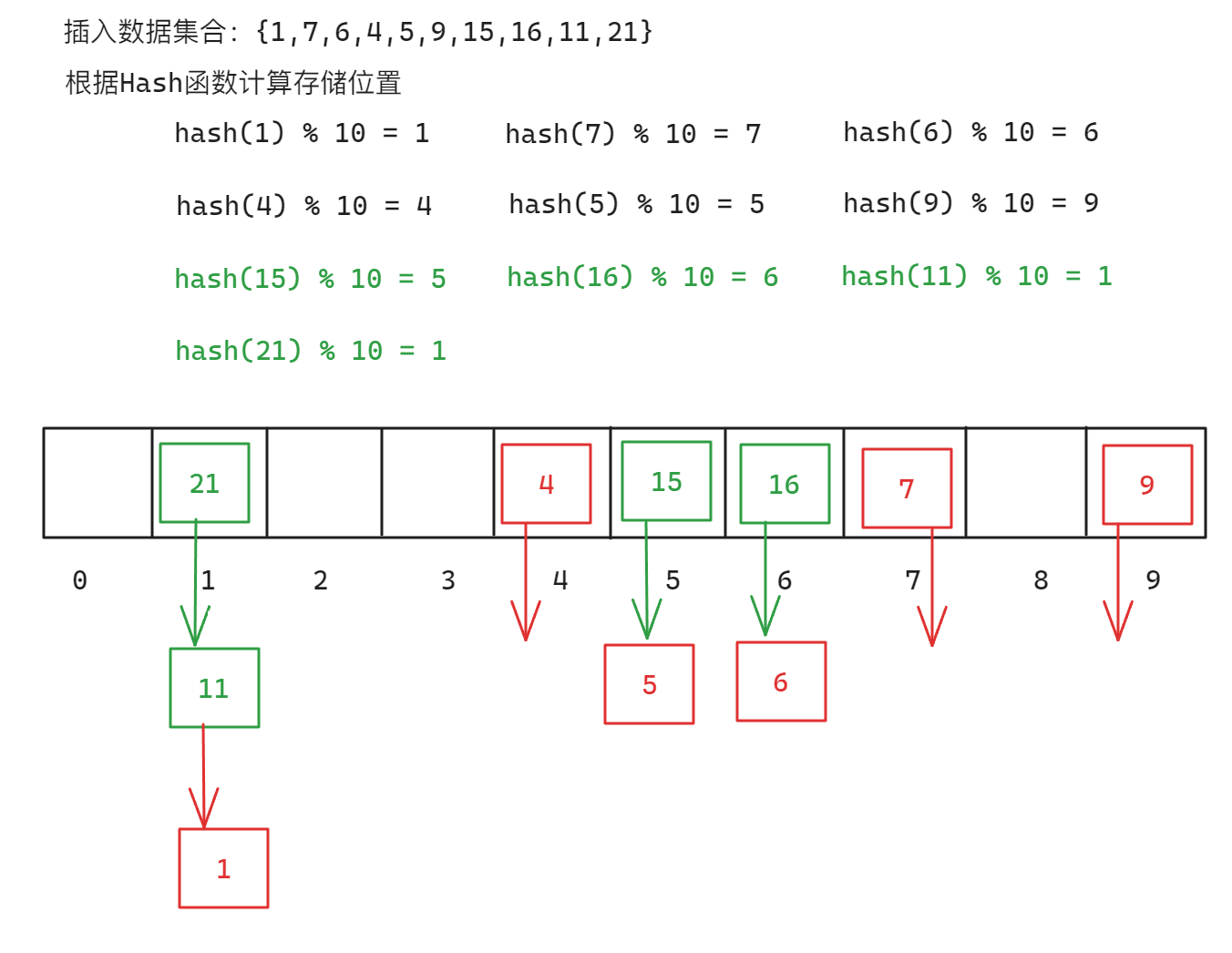
在哈希桶中也存在负载因子/载荷因子,但是哈希桶中的负载因子α一般在1左右
代码设计¶
结构设计¶
对于每一个哈希表数据就是一个链表节点,所以按照链表节点的形式定义即可
| C++ | |
|---|---|
1 2 3 4 5 6 7 | |
哈希表结构设计中需要注意是指向哈希数据节点的指针数组
| C++ | |
|---|---|
1 2 3 4 5 6 7 8 9 | |
数据插入¶
处理数据插入即为链表的插入,这里有两种插入方式,一种是头插,另一种是尾插,但是因为尾插需要找尾,所以使用头插
Note
不使用list是因为便于处理后面封装的问题
插入时需要考虑下面的问题:
- 因为初始化时,整个数组的每一个元素为空,代表没有头结点。当头插时需要注意防止空指针解引用问题
- 在扩容时可以采用与闭散列相同的思路进行,但是这种方法在当前情况下会有节点释放和创建的损耗,所以采用额外的逻辑进行扩容:将原来的节点重新挂到新的表中
| C++ | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 | |
数据查找¶
思路与闭散列基本一致,只是开散列换成了节点
| C++ | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 | |
数据删除¶
因为此时是节点,所以不可以直接删除,需要将待删除的节点的下一个与前一个进行链接才能删除
Note
注意此时不可以使用find函数,因为find只能找到删除的节点,但是找不到前一个节点,并且因为没有头结点,所以此时需要考虑头结点的删除和非头结点的删除两种情况
| C++ | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 | |
析构函数设计¶
在闭散列时并没有设计析构函数,因为vector会调用自己对应的析构函数,而且vector中的类型也是一个自定义类型会调用对应的析构函数,内置类型不处理,所以可以不用析构函数。但是在开散列中,每一个哈希数据都是一个在堆上开辟的节点,所以需要额外释放,vector本身的析构函数只能析构_table,不能析构每一个节点
| C++ | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 | |
比较key相等以及key转int仿函数¶
在前面的代码设计中,如果key本身就是int类型,那么可以直接进行取模操作,但是如果key是浮点类型则上述代码会编译报错,为了解决这个问题,可以引入一个仿函数用于key转int以及比较key相等的仿函数,对于浮点类型、负整型以及指针类型都可以直接强制转换为int类型,但是对于string类型来说,需要采用其他的方法进行处理,这里采用BKDR算法
Note
BKDR算法:用每一个string中的字符的ASCII值乘以31相加的结果作为待映射值
| C++ | |
|---|---|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 | |